
Roball Go
PUBLIC
China, 西安交通大学













Project Overview
The spherical mobile robot is an intelligent mobile robot with motion actuators, sensors, controllers, energy devices, etc. installed inside the spherical shell. Through manual operation or autonomous decision-making by the robot, it can travel in a variety of harsh environments such as sand, snow, and grass. , Mud, rocky ground, etc., and can have amphibious sports functions, so it has important scientific research significance, and can be used in consumer-grade entertainment projects, security inspections, environmental inspections, and national defense and military applications.
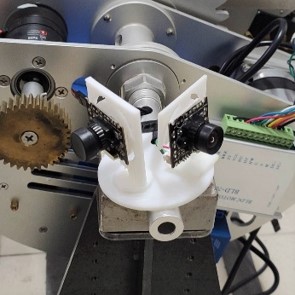
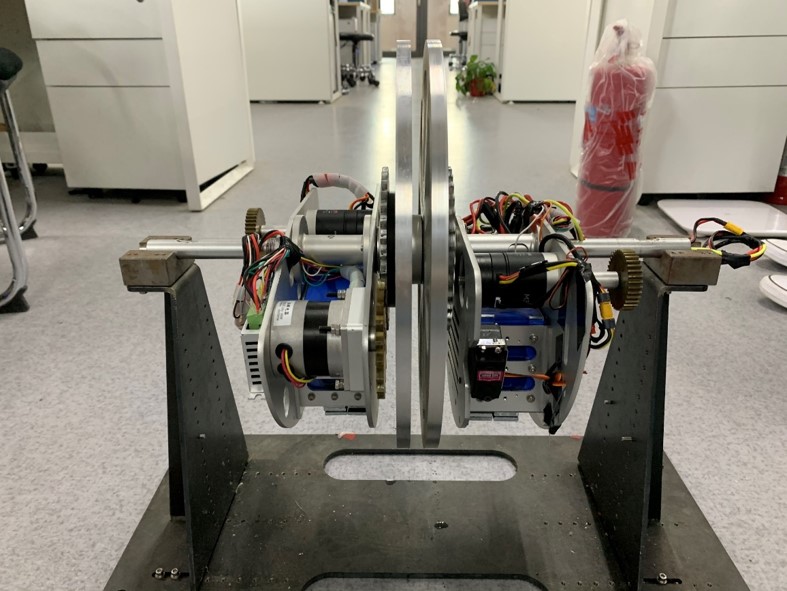
By studying the kinematics and dynamics models of the spherical mobile robot, the RPY attitude change matrix is used to analyze the coordinate system conversion relations commonly used by the spherical mobile robot, and the dynamics of the general heavy-swing spherical mobile robot on the sandy soil and the sandy slope are analyzed. Characteristics, and derive its dynamic model. The dynamic characteristics of friction wheels, flywheels and brakes inside a spherical mobile robot driven by eccentric repetition are studied, and the influence of repetition weight and flywheel speed on the performance of the robot is analyzed. Using flywheel self-stability and heavy pendulum eccentric drive scheme, the modular design of spherical mobile robot is realized, and reasonable schemes for large/small spherical shell, heavy pendulum, flywheel, hollow spindle, seals, wireless image transmission, and data testing are determined. Perform finite element analysis on key components such as hollow spindle and spherical shell assembly. Using STM32 as the main controller, the design of the control system of the spherical mobile robot is realized, and the friction wheel speed regulation, flywheel forward and reverse and brake stop experiments are carried out. A prototype of a spherical mobile robot driven by a heavy pendulum and eccentrically driven was built, which realized land balance experiment, water tightness test and bilateral wireless image transmission, and carried out linear movement, turning, climbing, flywheel self-stability, and flywheel brake of the spherical mobile robot. Stop the obstacle crossing experiment.
About Team
Jiyuan Song, Doctor of Mechanical Engineering.
Research field: Dynamic structure design and hardware design.
Yao Tu, Doctor of Mechanical Engineering.
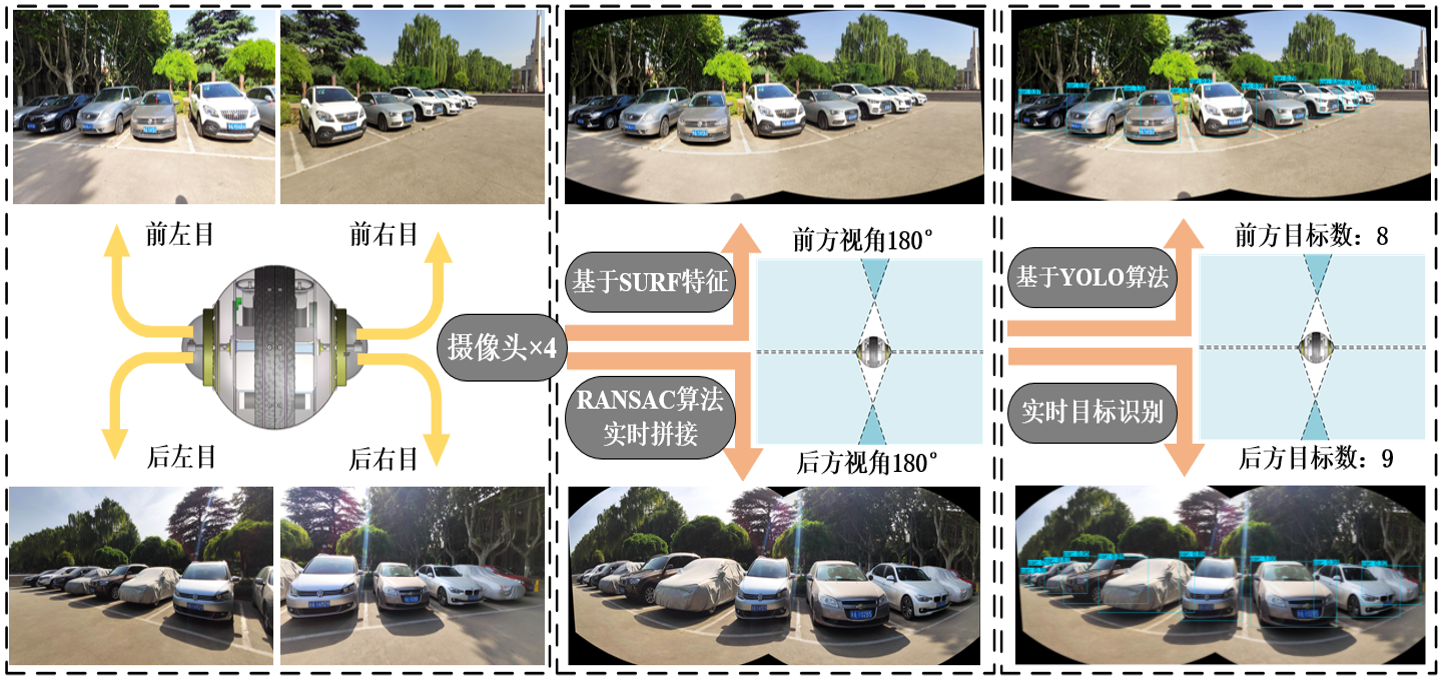
Research field: Visual navigation algorithm and perception.
Han Mao, Doctor of Mechanical Engineering.
Research field: Sensor data sensing and fusion.
Technologies we are looking to use in our projects
3D Printing
Artificial Neural Networks
Azure
Machine Learning